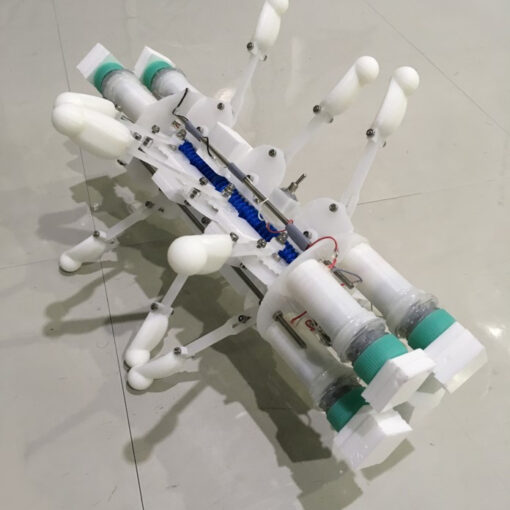
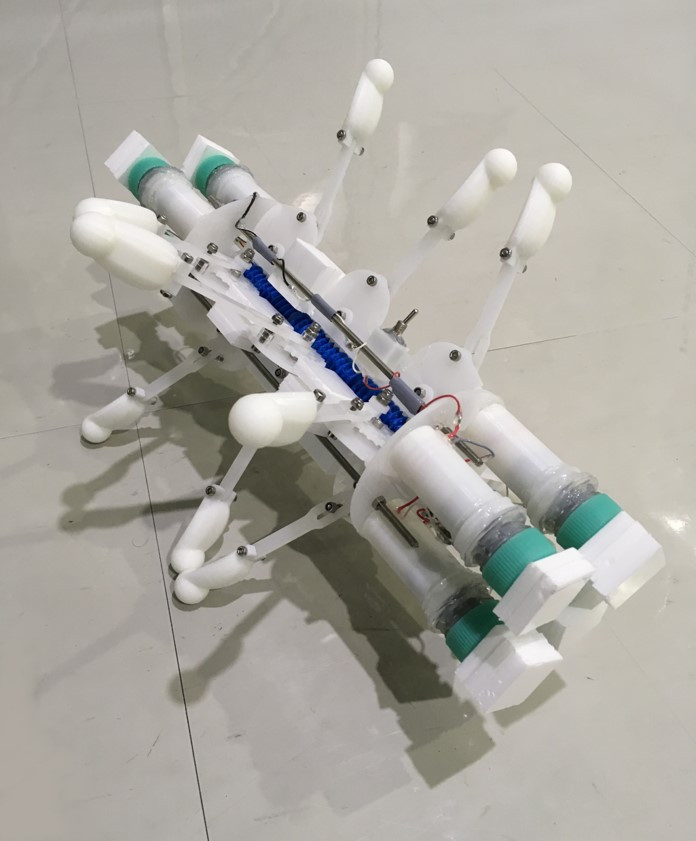
In rough terrains with uneven slope surfaces, it is often difficult to move by a legged robot having normal flat foot. We propose a gripping foot that automatically grasps ground by the robot’s weight when the robot put its foot onto ground and opens when the robot raises its foot. The mechanism of the grasping foot uses a simple linkage to transfer the gravitational force into appropriate side gripping force. This should be regarded as a passive jamming by linkage.
[1] S. Hakamada and S. Mikami, “Passive Gripping Foot for a Legged Robot to Move Over Rough Terrain,” in Robotics for Sustainable Future, vol. 324, D. Chugo, M. O. Tokhi, M. F. Silva, T. Nakamura, and K. Goher, Eds. Cham: Springer International Publishing, 2021, pp. 203–212. (DOI: 10.1007/978-3-030-86294-7_18)

{kind=link}
{kind=link}