Walking on a snow filed is an exceedingly challenging task even for humans. People living in snowy countries use snowshoe attached on shoes. However, for multiple legged robots, it is impossible to attach a large shoe. This is because the distance between adjacent legs is small.
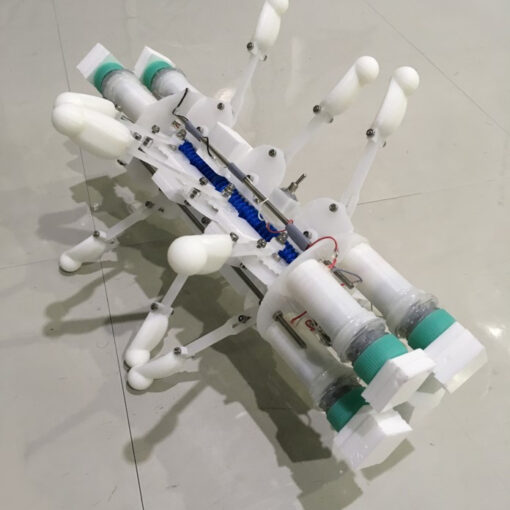
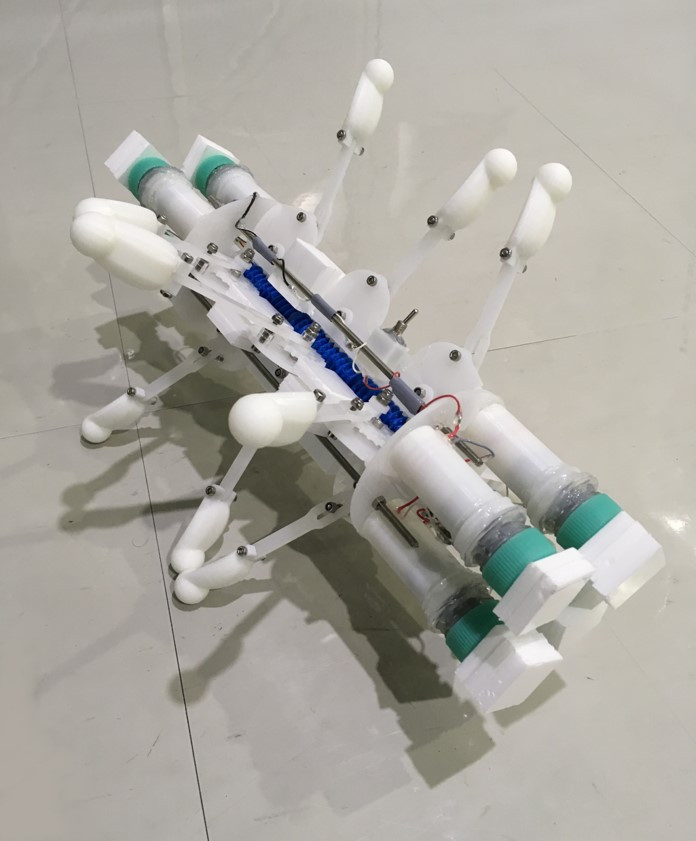
Our idea is to design a snowshoe for a robot that automatically opens when landing and closes when lifting a leg. The open/close movement is automatically done by the gravity and the robot’s weight. It is attachable to any existing legged robot without intervening to an existing robot’s controller.

{kind=link}